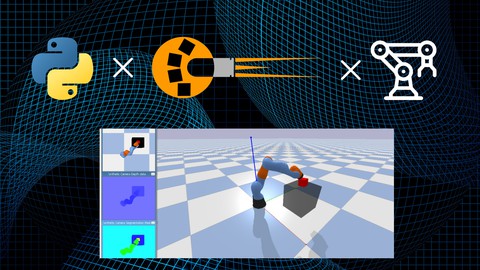
本コースでは、Pythonによる物理シミュレーション環境PyBulletを用い、その基本操作を学びながら、アームロボットの制御を行います。
アームロボットを目標物を追従するように制御し、ゲインや最大出力の変更を行います。また、物理シミュレーションにより得られた関節角度やトルク等の情報を、グラフおよびエクセルシートに保存します。
また、ロボット工学の基礎についてのセクションも用意しているため、ロボット工学に触れたことがない方でも、基礎的な内容を理解しコースを受講することができます。
セクション1では、コース全体の流れと特徴、そして物理シミュレーションの概要について紹介します。
セクション2では、物理シミュレーション環境PyBulletの導入とその基本操作について学びます。
セクション3では、アームロボットの読み込みと制御、ロボット工学の基礎について学びます。
セクション4では、物理シミュレーション環境からデータを取得し、グラフ表示、エクセル出力する方法について学びます。また、ゲインや最大出力を変更することで、アームロボットの挙動やグラフにどのような変化が現れるかについて、確認します。